原标题:想知道空间站的“多面手”是谁吗?一起来了解机械臂的奥秘 来源:央视新闻客户端
在中国空间站核心舱上,有一个非常重要的装备,就是空间站机械臂,它是我国目前智能程度最高、规模与技术难度最大、系统最复杂的空间智能制造系统。
功能如此强大的机械臂到底长什么样?记者采访了机械臂的设计方,一起了解一下。
总台央视记者 李宁:这个位置就是机械臂的起始位置,机械臂去工作的时候,都是从这个位置来出发的。

航天科技集团五院载人航天工程空间站系统副总指挥 王鑫:有一个大柱段,有一个圆圈,将来常驻构型,就是机械臂在这停泊。
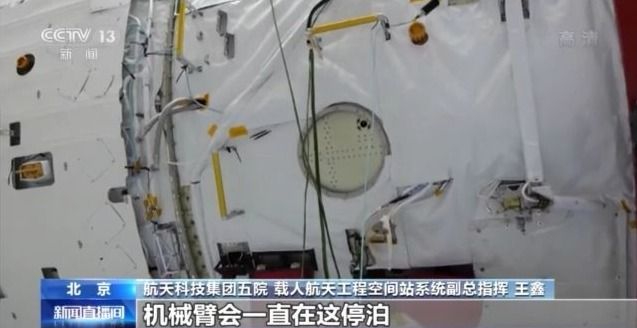
机械臂会一直在这停泊,将来可以在舱上爬行,舱上有这样的目标适配器,这样机械臂可以小柱段来回地爬行。
机械臂拥有7处关节 2处末端执行机构
空间站机械臂承担着悬停飞行器捕获、辅助航天员舱外活动、舱外货物搬运、舱体状态检查等重要任务,这些都需要机械臂具备精准控制和强大的自由运动能力。
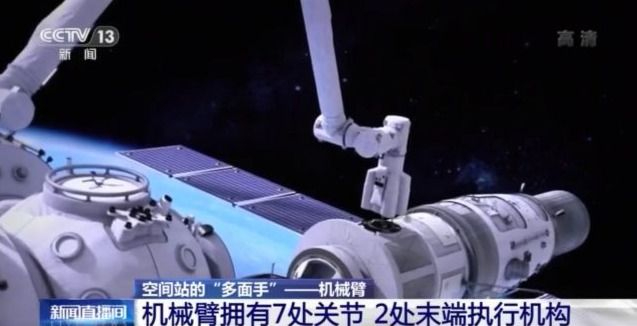
为此,空间站机械臂拥有7处关节、2处末端执行机构,对各位置的信息交互起到连接和转发的功能,对于机械臂关节和末端的灵活性、精准度起到着至关重要的作用。

航天科技集团五院 载人航天工程空间站系统主任设计师 应鹏:这是机械臂的一个地面的电性件,可以看到它现在被拆得很散,在天上叫整臂,所有的这些关节组合成一个组合体,进行相对的作业。

但是我们现在是在地面,有很多失重环境下比较难以模拟的一些工况,所以我们现在就把它拆成独立的单独每一个可以转动的组件,然后配以我们的模拟系统,跟天上的机械臂进行1:1的验证。
(编辑 郭廷轩)