来源:巅峰高地
近日,载人航天科普展在京举办,天宫空间站天和一号核心舱机械臂缩比模型也参与了展览活动。此前核心舱机械臂也曾以多种形式参加过公开展览,但此次展览所展示的信息显然更多。
 核心舱主机械臂末端执行器(缩比模型)
核心舱主机械臂末端执行器(缩比模型)从画面中可以看到核心舱机械臂末端执行器的细节构造,天和一号核心舱机械臂是天宫空间站的主机械臂,展开长度10.2米,质量738公斤,承载能力25吨,有7个自由度,有自动与手动两种工作模式,综合技术指标居于国际领先水平。
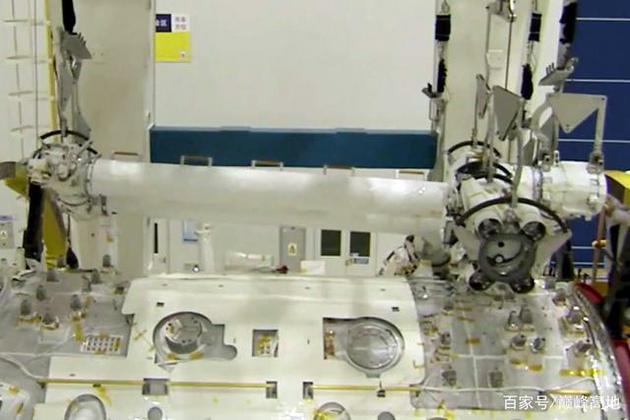 核心舱机械臂安装在小柱段外表面
核心舱机械臂安装在小柱段外表面核心舱机械臂由7个关节、两个臂杆、两个末端执行器、3台视觉相机组成,机械臂与人体手臂一样分为肩部、肘部、腕部三个活动部位,肩部与腕部各有3个关节,肘部一个关节,具备七自由度运动能力,肩部与腕部末端各配置一部末端执行器。
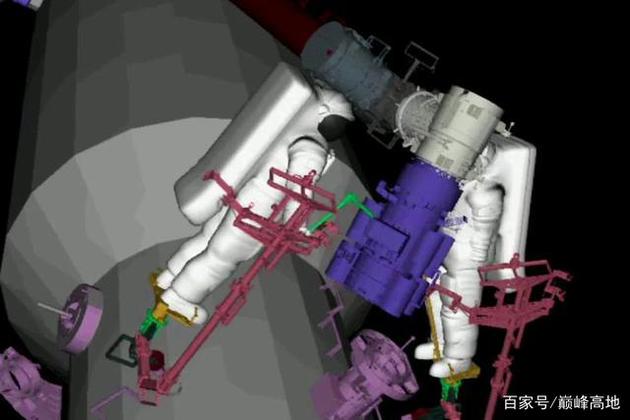
 核心舱机械臂微重力气浮平台抓取试验
核心舱机械臂微重力气浮平台抓取试验天宫空间站天和一号核心舱、问天号实验舱、梦天号实验舱三大舱体表面均配置有多个目标适配器,核心舱机械臂就是通过末端执行器与目标适配器之间的对接与分离实现舱体爬行功能,进而在更大范围触达空间站各舱体外表面。
 天和一号核心舱小柱段“目标适配器”
天和一号核心舱小柱段“目标适配器”目标适配器中心部位有一个抓斗销,抓斗销末端有一个球形装置,与机械臂末端执行器接触后这个球形装置将发挥限位连接功效,抓斗销周围还有三个倾斜杆,作用是提供额外的旋转稳定性,进而实现两个物体之间的刚性连接。
目标适配器四周还有用于电力、数据传输的接口,在两个航天器实现刚性连接的基础上传输电力与视频信号。
 天和一号核心舱大柱段“目标适配器”
天和一号核心舱大柱段“目标适配器”目标适配器也被称为电力数据抓取夹具,该装置最早源于大洋彼岸的航天飞机计划,当前在国际空间站任务中也有广泛应用。早期目标适配器仅用于两个物体之间的物理刚性连接,随着需求的变化,目标适配器增加了电力连接、数据连接等功能,是空间站建设运营过程中不可或缺的关键装备。
 天和一号核心舱机械臂辅助对接地面测试
天和一号核心舱机械臂辅助对接地面测试还可以在其他航天器上配置目标适配器与核心舱机械臂对接,进而形成基于机械臂捕获悬停航天器的交会对接方案,此方案可以简化追踪航天器用于交会对接的瞄准装置,多用于货运飞船的交会对接任务,减少的瞄准装置重量以及富余空间可以搭载更多上行货物,降低运营成本。
 天和一号核心舱机械臂手柄辅助航天员舱外移动
天和一号核心舱机械臂手柄辅助航天员舱外移动除此之外,核心舱机械臂末端执行器还可以对接脚限位器辅助航天员执行舱外任务,支持航天员大范围转移。机械臂臂杆上还依次设置了多个手柄装置,便于航天员的舱外活动。
 天和一号核心舱机械臂可支持两名航天员舱外活动
天和一号核心舱机械臂可支持两名航天员舱外活动天宫空间站完整的机械臂系统包含有两套机械臂,一套是核心舱主机械臂,另一套是问天号实验舱机械臂。
 核心舱主机械臂与实验舱机械臂对接
核心舱主机械臂与实验舱机械臂对接实验舱机械臂也是七自由度机械臂,相较于核心舱机械臂更加灵巧,可用于实验舱暴露载荷平台照料,也可支持航天员大范围转移的舱外活动,同时还能与核心舱主机械臂末端执行器对接形成总长超过15米的超大型机械臂,并基于核心舱机械臂的舱体爬行功能,实现空间站外表面的全触达。