原标题:帮助NASA毅力号探测器登陆火星的机器人导航技术将探索深海 来源:cnBeta.COM
地形相关导航帮助 "毅力号"在火星上自主着陆,以及 "机智号"火星无人机的飞行。现在是时候测试一个类似的系统,同时探索另一个前沿领域了。5月14日,美国国家海洋和大气管理局(NOAA)的Okeanos Explorer号船从佛罗里达州的卡纳维拉尔港出发,进行为期两周的考察,这次行动由NOAA海洋探索部领导,主要展示自主水下航行器的技术。

这种新型潜水机器人被称为 "奥菲斯",它将展示一个系统,帮助它找到自己的方向并识别海底有趣的科学特征。
地形相关导航在帮助美国宇航局的火星2020“毅力号”火星车于2月18日在红色星球上精确着陆方面发挥了重要作用。该系统使正在下降的机器人能够直观地描绘火星景观,识别危险,然后在没有人类协助的情况下选择一个安全的地方降落。以类似的方式,该机构的“机智号”火星直升机使用基于视觉的导航系统,在飞行过程中跟踪地面特征,以估计其在火星表面的运动。
由位于南加州的美国宇航局喷气推进实验室的工程师开发,在火星上使用的基于视觉的导航的进化到了海上,现在将在离家近一点的地方进行试运行:在美国东海岸的大西洋。
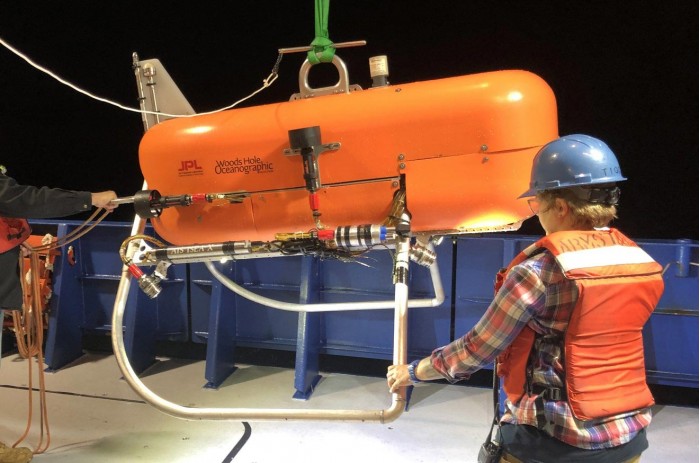
该潜水器可以探索海洋的最深处,创建海底的三维地图。在这张照片中显示的是在之前的一次探险中,奥菲斯(Orpheus)比其他潜水器小得多,使其更容易运输和操作。
像声纳这样的大型高功率定位设备通常需要在海底附近的黑暗和经常阴暗的水域中航行。通过利用低功率的相机和灯光系统以及先进的软件,奥菲斯(Orpheus)比大多数深海潜水器要轻一个数量级。奥菲斯比一辆四轮人力车还小,重约550磅(250公斤),设计成灵活、易于操作、坚固耐用,同时探索大多数车辆无法到达的深度。
由伍兹霍尔海洋研究所(WHOI)与JPL合作设计,奥菲斯几乎可以在海洋的任何地方不受束缚地工作,包括最极端的深度。最终,该项目团队希望看到这些水下机器人群作为一个团队工作,以建立哈代尔区广大未开发的海底区域的三维地图--这些区域的深度超过20000英尺(6000米)。但是,在机器人能够探索这些深度之前,它必须首先在较浅的水域进行试验。
奥菲斯"基于视觉的导航"能力被称为视觉-惯性测距,或xVIO,它通过使用先进的相机系统和模式匹配软件,以及能够精确测量其方向和运动的仪器来工作。当 "奥菲斯"号在海底行驶时,xVIO可以识别车辆下方的特征,如岩石、贝壳和珊瑚。就像在公路旅行中记住地标一样,xVIO将利用这些特征作为航点构建3D地图,以帮助它导航。但这个系统也不仅仅是防止潜水机器人迷路的手段。

奥菲斯技术演示将在NOAA的Okeanos Explorer号船上进行。5月14日从佛罗里达州的卡纳维拉尔港出发后,为期两周的探险队将在美国东海岸附近水域进行探索。
xVIO创建的高分辨率地图被存储到内存中,这样当Orpheus回到该地区时,它将识别出地物的独特分布,并将其作为一个起点来扩大其探索。而在与机器人伙伴合作时,地图可以被共享、交叉引用和开发,以快速确定科学兴趣区域。
"在未来,一些最极端的海洋环境将在我们的掌控之中。从深海海沟到热液喷口,我们将探索许多新的目的地,"同样在JPL的系统工程师Andy Klesh说。"通过保持小规模,我们已经为海洋科学家创造了一个新的、简化的工具--作为自主太空探索的模拟系统,它直接有利于美国国家航空航天局。"
"在未来,一些最极端的海洋环境将在我们的掌控之中。从深海海沟到热液喷口,有许多我们将探索的新目的地,"同样在JPL的系统工程师Andy Klesh说。"通过保持小规模,我们已经为海洋科学家创造了一个新的、简化的工具--作为自主太空探索的类似系统,它直接有利于美国国家航空航天局。
Klesh指出了NASA与像WHOI和NOAA这样的组织之间合作的另一个优点,他们拥有广泛的海洋学专业知识。正在开发的用智能、小型和坚固的自主水下航行器探索地球海洋的技术最终可以被用于探索其他世界的海洋。
地球的类似物经常被用作太阳系其他地方的环境替身。例如,木星的卫星木卫二表面就拥有一个海洋,可能存在对生命有利的条件。在地球上的超深渊带深度和压力大致相当于木卫二的地下海洋的底部,被认为可能有80公里[50英里]深。这次探险可能成为对我们自己的星球带来新发现的垫脚石,包括回答那个最基本的问题,这是一件很有意义的事情。生命是地球所独有的,还是在这个苍白的蓝点之外还有其他可能产生生命的地方?但是,在我们能够探索木卫二或任何其他海洋世界之前,我们必须首先更好地了解我们自己的家园。