原标题:频上热搜的马斯克 被“高估”的特斯拉 来源:雷锋网
今日马斯克又上热搜了,然而与特斯拉没关,也与Space X没关。对于公众而言,似乎更关心的是特斯拉的安全问题。本月初,美国南加州一辆 Model 3 汽车与一辆翻倒的半挂车相撞,造成Model 3 车主死亡,卡车司机和另一名摩托车司机受伤。
最近,这名车主的Tiktok账户曝光,35岁的Steven Hendrickson生前曾发布过两个关于特斯拉的视频,视频中他驾驶着自己的Model 3,双手没有在方向盘上,还在称赞AutoPilot很牛。
他在配文中表示,如果没有自动驾驶该怎么办?感谢上帝,自动驾驶!特斯拉是有史以来最好的车!
在此不久,4月中旬,特斯拉在美国德州发生的严重车祸,直接造成两人当场死亡。到目前为止,美国国家公路交通安全管理局已经有 29 宗针对特斯拉汽车的调查,25起仍在进行。
接二连三的事故给特斯拉蒙上了阴影,Autopilot已经引起人们广泛的争论。那么一直被马斯克引以为傲的“Autopilot”,到底真的安全吗?
Autopilot:自动驾驶还是辅助驾驶?
“Autopilot已经足够好,除非你真的想体验开车的感觉,否则你大部分时间都不需要亲自驾车。”马斯克在参加一次播客节目中说道,在年初的电话会议上,他还表示“对在今年完成全自动驾驶充满信心,并且其可靠性将超越人类驾驶员。”
但这一说法遭到公司内部人员的否认。Autopilot软件主管CJ Moore对加州机动车辆管理局(DMV)表示,马斯克显然高估了自家公司的驾驶辅助系统,“他说的和工程上的实际情况根本不符,特斯拉目前处于 Level 2 级自动驾驶水平。”
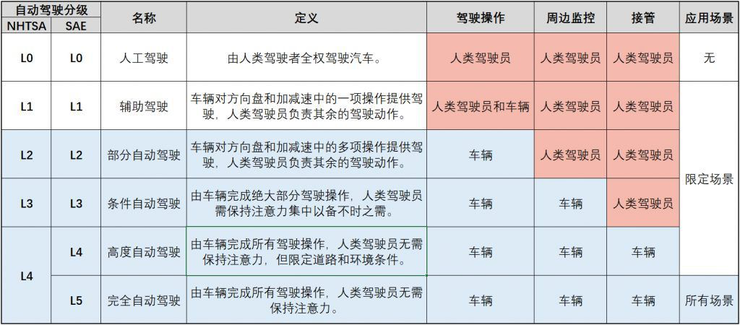
雷锋网了解到,根据美国机动车工程师学会SAE的分类标准,自动驾驶一共分为6级,L0~L2阶段以驾驶员为主体,自动驾驶系统提供ACC(自适应巡航)、 AEB(紧急刹车)、LKA(车道保持辅助)等功能;L3级别及以上则由驾驶系统来控制汽车,驾驶员起辅助作用;L5为最高级别,即完全自动驾驶。
在特斯拉官方介绍中,Autopilot的功能主要包括自动辅助导航驾驶、自动辅助变道、召唤及泊车功能。按照功能划分,Autopilot的自动驾驶水平应该在L2~L3之间,国内汽车测试网站Auto-Testing将其评为L2+,没有到达L3的水平。
美国全国运输安全委员会(NTSB)在2月份曾批评Tesla在公路上利用驾驶者测试最新发布、仍属于测试版的FSD系统(完全自动驾驶系统),实际上只有L2等级的效能,不顾司机和其他道路使用者安全。
到目前为止,特斯拉主要车型Model3/Y/X/S仍然配备的是Autopilot,这一系统完全不足以实现高水平的完全自动驾驶,应该归为“自动辅助驾驶”。
Autopilot没那么神
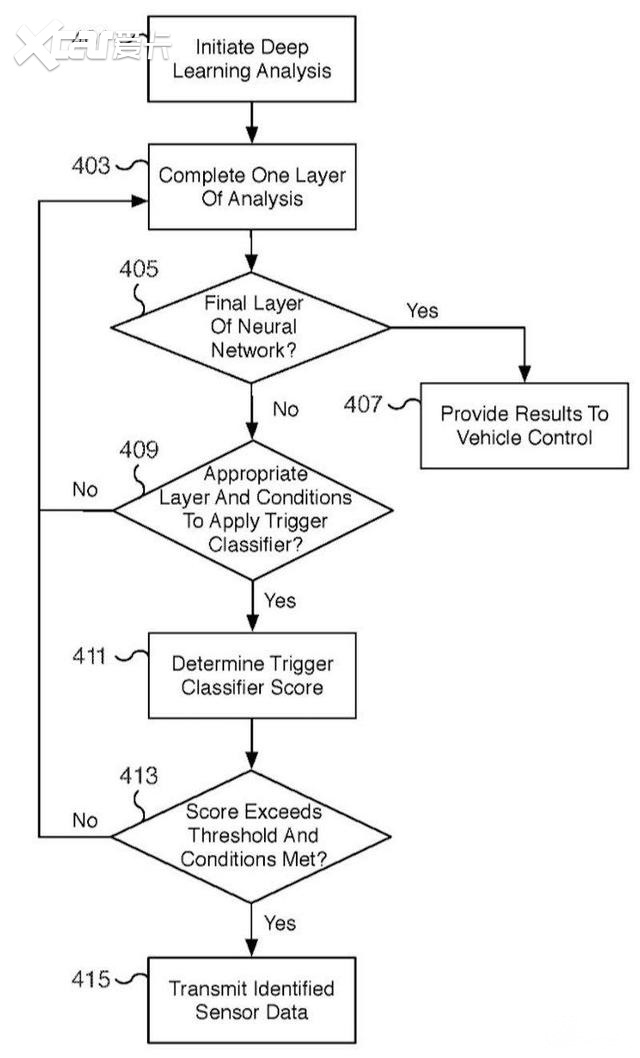
自动驾驶系统主要由硬件感知和软件处理构成,通常要经历“信息获取”到“信息处理”到“信息决策”再到“控制”这个过程,即通过硬件来感知和识别道路信息以及前方物体,传递到处理器,通过算法来侦查路况和计算物体与车辆的距离,进而实现行人探测、车道偏离、变更车道等ADAS功能。

也就是说,Autopilot要实现自动辅助驾驶功能,一靠摄像头,二靠处理器(核心是算法)。目前市面上最新的特斯拉已经配备了Autopilot Hardware3.0版本,处理器采用的是自研FSD,配有3个前摄像头,1个后置摄像头,2个侧前/后摄像头,并配有12个超声波传感器和1个前置毫米波雷达。
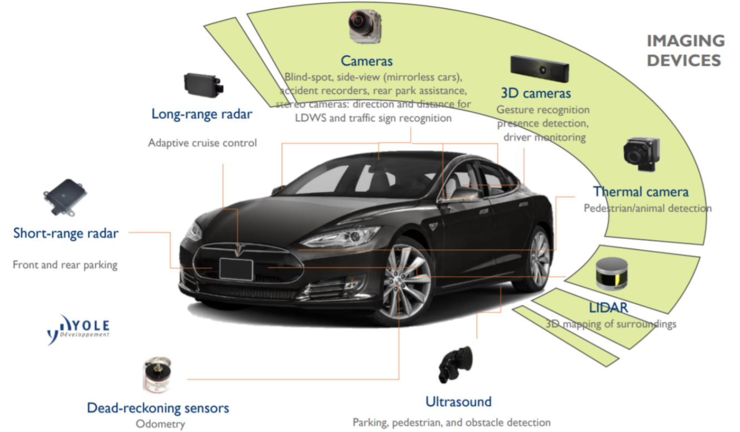
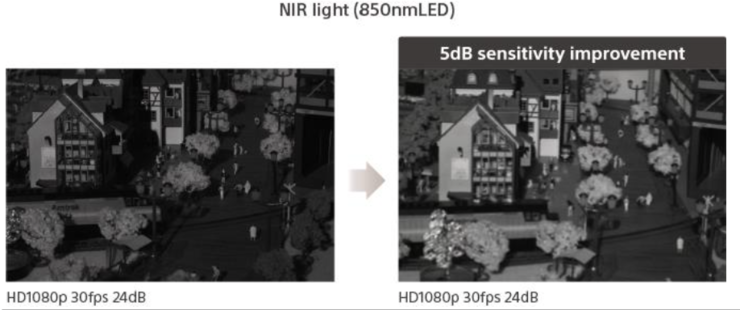
与Google旗下的自动驾驶公司 Waymo不同,特斯拉非常热衷于通过给汽车配置视觉设备和运算系统来实现自动驾驶(即视觉感知),最早版本的Autopilot的处理器就是MobilEye Q3。为此,特斯拉不论从硬件还是软件都引用了新技术。比如,特斯拉最新的摄像头CIS滤光片,改变了以往采用的RGGB阵列,而选用RCCB阵列,从而提高弱光环境下的性能表现,成像更为清晰。
但是视觉感知存在的问题是,摄像头会受到诸如天气、阳光等因素的影响,在一些特殊场景下可能识别出错。由于主要依靠视觉感知来进行决策控制,即便雷达在识别到潜在的物体,那么整个系统也倾向于主摄像头传感器的判断,从而导致事故。
2016年,特斯拉在美国弗罗里达发生一起事故,就是因为摄像头没有识别到处于车辆前方的卡车车厢,雷达已经感应到,但系统基于摄像头误判为一块路牌,进而引发车祸。
业内通常认为,视觉感知和雷达能够适用比较普通的行车环境,但是最优的解决方案,是使用激光雷达。激光雷达具备高精度、高分辨率的特点,能建立起3D感知图,与摄像头和超声波传感器互为补充,识别更为精确的行车环境。
不过特斯拉完全没有配备激光雷达的意思,作为视觉感知派的拥趸,马斯克不止一次公开调侃激光雷达:“车辆上的雷达方案是极其愚蠢的,任何使用激光雷达方案的人或者企业最后都将失败,他们大费周章的使用这些昂贵的传感器本身就是一个麻烦。”
这是因为激光雷达成本太高,Waymo使用的 Velodyne 64线的激光雷达,单个售价高达7.5万美元,而且有价无市。如果特斯拉采用激光雷达,那么成本无疑会大幅提升,消费者很难会承受如此高昂的价格,所以特斯拉坚持搞视觉算法。
除了在硬件感知上的问题,Autopilot的软件也存在一些问题。雷锋网了解到,特斯拉在设计Autopilot的时候,理念是“先硬件,后软件”,硬件会随着车型的更替而迭代,但软件会基于原有的OTA平台更新固件,实现升级。
特斯拉之所以能够实现更新升级,关键在于Autopilot的传感器会实时将数据传递给特斯拉的中央服务器,通过大量真实的数据来对算法进行优化,从而完善Autopilot在特殊场景下的信息处理和控制。
换句话说,每一次新场景,或是行车事故,数据都会被传到特斯拉的服务器,成为分析数据,以不断优化Autopilot。Autopilot的不断迭代,已经说明,不论是从硬件感知,还是软件算法上,这都不是一个全自动驾驶系统。
Autopilot:可用但不完全可靠
从Autopilo Hardware2.0开始,马斯克一直在鼓吹Autopilot的自动驾驶水平。在最初的特斯拉中国网站上,Autopilot的翻译显示为“自动驾驶”,不过在2016年的一场特斯拉车祸之后,悄悄改成了“自动辅助驾驶”。
除此之外,马斯克也在多个场合,包括在去年的世界人工智能展上,暗示搭载FSD系统的Tesla车辆“已经相当接近Level 5”。作为Autopilot的升级版,FSD Beta在硬件和算法上都进行了优化,但造价成本更高,并未完全投入使用,且FSD Beta也并没有达到L5的水平。
事实上,目前并没有任何一家汽车厂商宣布实现全自动驾驶。不论是新能源汽车厂商还是传统车企,许多都已能达到L2的自动驾驶水平,比如特斯拉的Autopilot,蔚来的NIOpilot,长城的i-Pilot。
据报道,自宣达到L3水平的车企有两家:奥迪(A8)和丰田(Highway Teammate)。值得一提的是,这两家车企宣布达到L3水平的车型,均配备了前置激光雷达。
一直以来,特斯拉把电动车配置的辅助驾驶功能称之为“Autopilot”(英文意思是自动驾驶)和“完全自动驾驶”。一些专家认为这会给消费者造成误导,以为电动车能够自己完成操控,而听信马斯克“谎言”导致的事故也不在少数。在特斯拉的老家——加州,政府对于特斯拉的自动驾驶水平也持警惕态度。
5月12日,美国加州一名特斯拉车主因鲁莽驾驶和违抗治安官命令被逮捕。
该车主在高速公路上行驶时不在驾驶位上,而是坐在汽车后排。加州高速公路巡逻队在大桥收费站发现了这辆“无人驾驶”的特斯拉,并当场逮捕车主,将其收监,同时将车辆作为证物一并拖走。

在将这辆“无人驾驶”特斯拉拖走之后,巡逻队发言人约翰・弗兰森表示,无人状态下驾驶汽车在加州是违法的。他说:“我们希望人们认识到,驾驶行为责任重大,这不能分心,也不能是玩弄技术。”巡逻队甚至要求人们如果看到“类似这样的不寻常事件”,立即拨打 911 报警电话。
所以说,特斯拉车主在启用Autopilot时,不能小心大意。
你凭什么去相信一个整天炒币,鼓吹Autopilot自动驾驶水平的马斯克,而不相信参与开发这个系统的技术人员和当地警局的告诫呢?