原标题:MIT Digger Finger机器人:可以感知埋在地下的物品 来源:cnBeta.COM
据外媒报道,最近,我们在机器人的发展中看到了一些令人兴奋的进展,这些机器人可以以相当趣味的方式跟物体互动,从像大象鼻子一样工作的抓爪、卷曲在奇怪物品周围的装置到使用电镀黏附来抓取脆弱的东西如鸡蛋等其他设备。现在,麻省理工学院(MIT)科学家则将这一技术提升到了一个全新的水平或者说是“更低”的水平。

据悉,该技术通过挖掘颗粒介质来感知埋在地表下的物体。最新展示的Digger Finger是MIT研究人员之前GelSight研究的延续。
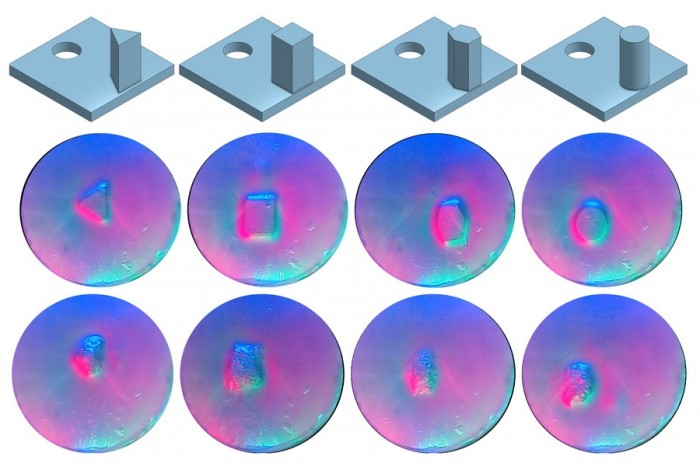
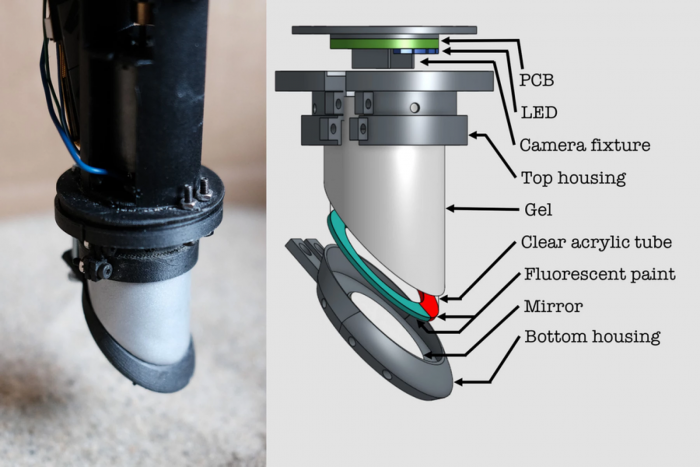
科学家们希望建立一套可以感知淹没在颗粒状材料如沙子或碎石中的物体的机器人系统,他们采用了GelSight技术并对设计做了一些调整--其中包括改变形状使其表现为一个带有斜角尖的薄圆柱体、更换掉三个LED中的两个然后添加一些彩色荧光涂料以节省空间等。
然后,这个小小的手指状装置被安装在机械臂上使其能拨开细沙和大米等物质,通过轻轻扭动或振动来清除感知区域的障碍物进而避免堵塞。这些设置需要根据手指试图挖掘的材料类型、大小和形状进行配置,不过事实证明,尖端锋利的机器人手指能够通过探测水下物体的形状。
科学家们认为,这项技术可以填补探测地下物体的传感技术的空白,像探地雷达可能就无法区分埋在地下的骨头和岩石。
研究论文作者Edward Adelson表示:“所以,我们的想法是让手指具有良好的触觉,能够区分它所感受到的各种不同的东西。比如,如果你试图找到并拆除埋在地下的炸弹,这将很有帮助。”
除了拆除炸弹或埋在地下的地雷,这项技术还可以用来发现或检查埋在地下的电缆。展望未来,科学家们认为它有助于加快人工触摸技术的发展并将其带入新的领域,比如医疗领域,其可以在手术中感知肿瘤。
Adelson称:“随着人工触摸技术的进步,我们希望能在被各种分散注意力的信息包围的情况下使用它。我们希望能够区分重要的东西和不重要的东西。”