原标题:十年后,谁来帮你分担家务,排忧解难?
原创 陈小平 我是科学家iScientist 收录于话题#我是科学家 · 演讲合集126个
2020年10月25日,“科普中国-我是科学家”第28期“AI:人工智能,或者爱”演讲现场,中国科学技术大学计算机科学与技术学院教授、机器人技术标准创新基地主任、全球人工智能理事会执行委员陈小平带来演讲:《十年后,谁来帮你分担家务,排忧解难?》。
以下为陈小平演讲实录:
2020.10.25 合肥
大家好,我是陈小平。我今天想和大家分享:十年后,我们的生活会是什么样?
现在科技发展很快,经济发展也很快,想想看:十年后,家务活谁做?或者,有一些空巢老人觉得寂寞,谁来帮他们排解寂寞,碰到了困难谁来帮他们解决?
我们想用机器人帮助大家做这些事情。
为了实现这个目标,我们中国科大机器人团队研发了两款机器人。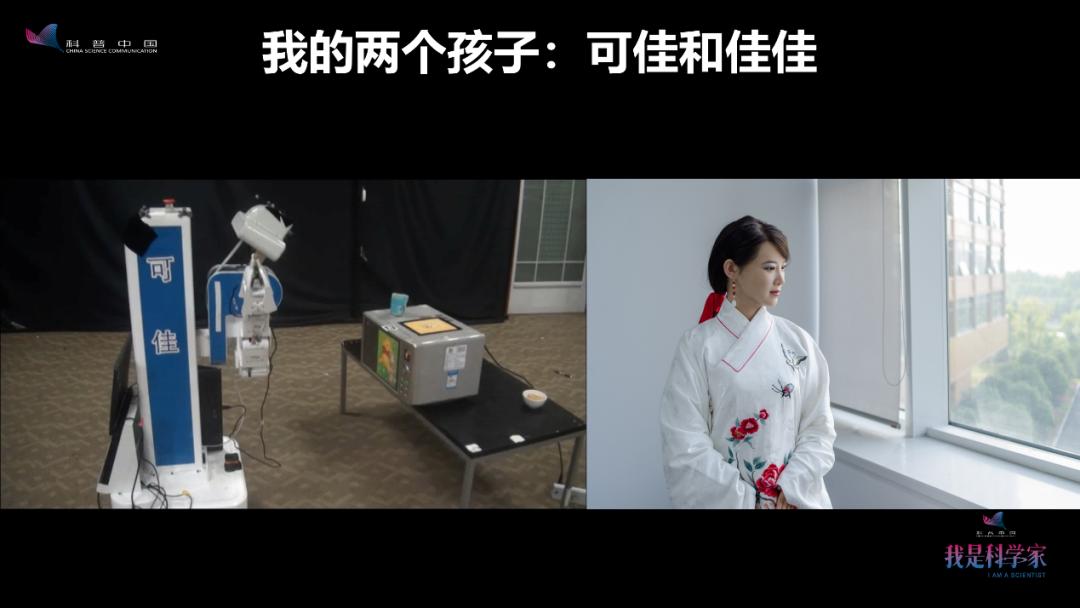 左边这个是可佳机器人。看起来其貌不扬,但是聪明能干、任劳任怨。右边这位美女是佳佳机器人,非常漂亮。有人问,能不能将它们合到一起?将来会合到一起的,未来我们的机器人会上得厅堂,下得厨房。
左边这个是可佳机器人。看起来其貌不扬,但是聪明能干、任劳任怨。右边这位美女是佳佳机器人,非常漂亮。有人问,能不能将它们合到一起?将来会合到一起的,未来我们的机器人会上得厅堂,下得厨房。可佳机器人,为什么叫“可佳”?这个名字源于中国古代公元四世纪的一份文献,记录了一个神话故事,讲的是,一个孤儿住在海边,他非常辛苦,又要忙工作又要忙家务。有一天,他捡到一只田螺,养在水缸里。养了三年后,突然有一天,他回家后发现家里的活都干好了,但不知道是谁,每天都是这样。有一天他就提前回来,发现田螺姑娘从水缸里钻出来了,帮他干家务。这个故事叫《海螺姑娘》(也有版本叫《田螺姑娘》)。“海螺”的英文是conch,所以我们为这个机器人取了音译的名字“可佳”。
这个神话传说反映了什么?我认为,“海螺姑娘”或“田螺姑娘”就是家庭服务机器人的一个文化原形。一些欧美机器人专家同行也都接受我这个观点。所以啊,早在公元四世纪,我们中国人就开始设想将来有这种家庭服务机器人,它们干活应该像可佳这样,而相貌要像佳佳这样。当然,这也是我们现在的理想。
最初我是怎么想出来的呢?也不是那么容易。
25年前,我就在做人工智能理论的研究。当时我的一个主要课题叫做“意图逻辑”,因为那时候有一些意图逻辑的难题,其中有一个难题叫“副作用问题”,十几年、二十年国际上都解决不了。
我想了一个办法,提出一个理论,把这个问题基本上解决了,然后那篇论文就被世界人工智能联合大会录用了。我去做报告,结果很多人来听,我就很奇怪,为什么有这么多人关心这个问题?当时,我们中国的人工智能发展,还没有现在这么热烈。那届大会上,有200篇正式论文,中国大陆只有我这一篇,所以很多人来看,这是一个什么样的怪物?
这件事给我帮助很大。因为引起了很多人的关注,我得以和当时国际上人工智能领域的一些领军学者、一流学者直接面对面交流。
通过交流,我学到了很多书本或论文中没有的东西。其中一条是,我发现这些一流的、领军的学者,虽然他们的论文大部分写的是纯理论,有很多数学(我的论文里全是数学),但我发现,他们心里都有明确的应用背景,他们想的是十年、二十年、五十年以后可能有什么应用需要。我觉得我也应该这样。
回来后,我就想,做什么呢?
我想做机器人。当时中国还不太需要机器人,因为我们的劳动力过剩;但我相信,未来中国还是需要机器人的。
那么,要怎么学会做机器人呢?当时我不懂机器人,整个团队也都不懂。我们需要学习。怎么能懂呢?我想的是,我们要去参加一个比赛。因为,读书读得再好,考了一百分,作为一个学生是不错了,但作为一个研究人员,这说明不了什么问题。
于是我们就去参加机器人世界杯,RoboCup。这个比赛其实是一个50年的科学计划,计划用50年时间,到2050年前后,要让机器人的能力要和人类差不多。
我们从2000年开始参加这个比赛。一开始我们什么都不懂,就是学习。到2006年,我们得到了第一个世界冠军。
 这张照片中间就是我们当时的两位核心队员,左边是第二名德国队,右边是第三名日本队。
这张照片中间就是我们当时的两位核心队员,左边是第二名德国队,右边是第三名日本队。 从2006年到前几年,我们一共得了12次世界冠军。这张照片是2007年在美国亚特兰大,左边是颁奖嘉宾彼得·斯通教授,他是国际人工智能青年科学家奖获奖者——这个奖每年只发给一位科学家。很荣幸,他也是参赛的选手,我们和他同场竞技。
从2006年到前几年,我们一共得了12次世界冠军。这张照片是2007年在美国亚特兰大,左边是颁奖嘉宾彼得·斯通教授,他是国际人工智能青年科学家奖获奖者——这个奖每年只发给一位科学家。很荣幸,他也是参赛的选手,我们和他同场竞技。那一年,我们参加了10项比赛中的4项比赛,得了2项冠军、1项亚军、1项第四名,获得了总成绩世界第一。这个“世界第一”未必说明我们的机器人水平达到了世界第一,但至少证明我们懂了机器人。
懂了以后,怎么办?我们想要做一件和实际应用、原始创新更加密切相关的事。2008年,我们决定做可佳机器人。这可比机器人足球难多了。
现在人工智能比较火的是“阿尔法狗”。大家知道,阿尔法狗战胜了很多顶级的人类围棋高手。它到底是怎么赢的?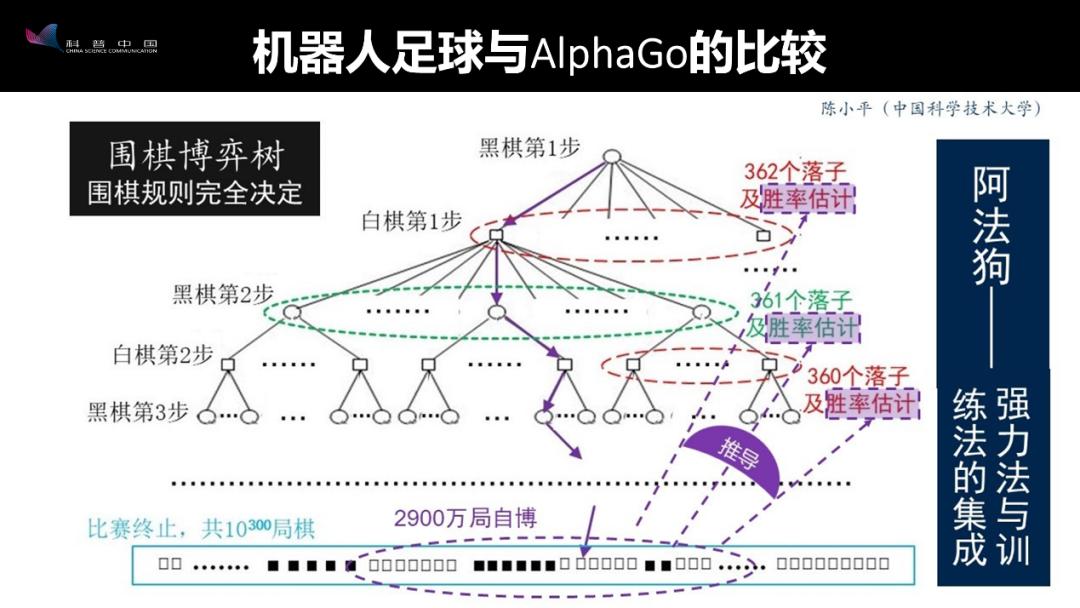 阿尔法狗下棋,不是看一盘一盘的棋,它是看所有的棋,根据围棋规则画出这样一棵树,叫做博弈树:第一步,根据围棋规则,黑棋要先走,它走的时候棋盘上有361个点可以落子,另外它也可以选择不走,所以总共有362个落子(或者叫行动)选择,它从中间选一个。
阿尔法狗下棋,不是看一盘一盘的棋,它是看所有的棋,根据围棋规则画出这样一棵树,叫做博弈树:第一步,根据围棋规则,黑棋要先走,它走的时候棋盘上有361个点可以落子,另外它也可以选择不走,所以总共有362个落子(或者叫行动)选择,它从中间选一个。阿尔法狗怎么选?阿尔法狗不管对手,它只管选胜率最大的那个落子。第一步走了以后,第二步如果也是阿尔法狗走,那它能选多少?因为黑棋已经占了一个点,白棋能走的就少了一个点,它就从361个落子中选一个,一直这样走下去,比如按照这样一条线走了一局棋。
围棋总共有多少局棋呢?有10300那么多局。太多了,我们算不出胜率怎么办?阿尔法狗的办法叫“自博”,就是自己跟自己下,下了2900万局。这些自博不是乱下,也不是用深度学习下,而是用了强力法中的一个关键技术蒙特卡洛树搜索(Monte Carlo tree search),它找到2900万局棋,再从这些棋里反推出所有落子的胜率估计。它用40天把这些胜率估计都学出来了,以后就根据胜率估计下棋,战胜了所有的人。
机器人足球也有一棵博弈树,但它比围棋博弈树复杂太多。首先,围棋比赛是1:1,而机器人足球赛是11:11,这是第一个区别;第二个区别是,围棋中一步棋最大的选择是有362种,而机器人足球“仿真2D”比赛中,每一步都有3700万种选择。所以,我们人工智能程序要从那么多选择里选出最优的,比阿尔法狗还要复杂。
但这些都不是最复杂的。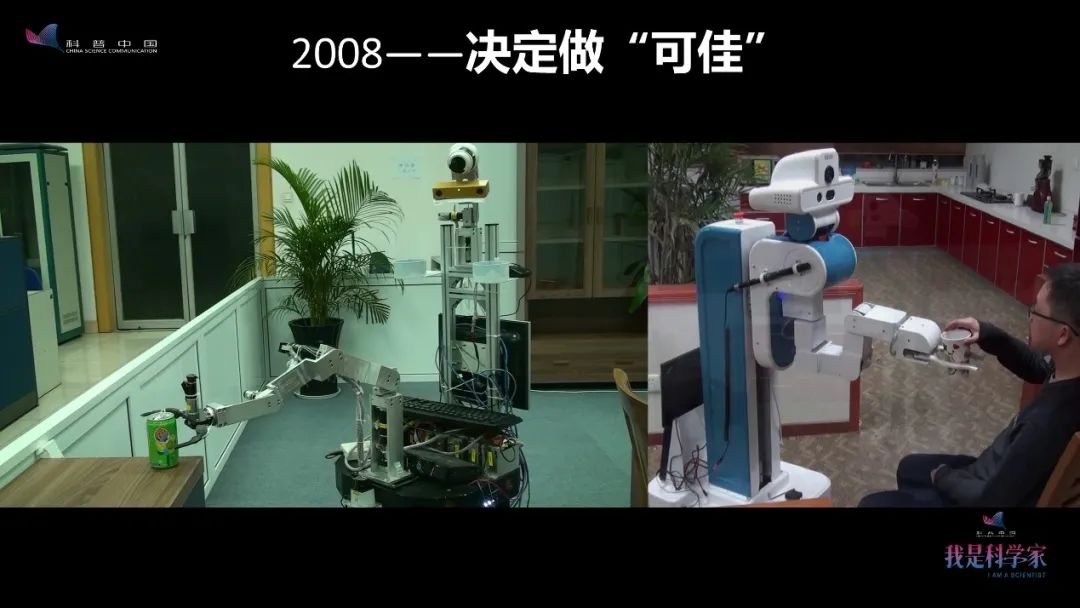 要让机器人进入家庭,比这些都更加复杂。
要让机器人进入家庭,比这些都更加复杂。为什么呢?因为围棋和机器人足球中的选择范围是固定的,就那么多,但在家庭环境里,我们不知道会发生什么情况。所以,2008年决定做可佳机器人,也是非常有挑战性的。我们就以机器人足球的技术作为基础,进一步往前走。
 我们先在实验室里为机器人搭了一个家,在这里做一些试验。这是客厅,远一点是厨房——厨房里什么都有的,是真的能做饭的厨房,再旁边是卧室。
我们先在实验室里为机器人搭了一个家,在这里做一些试验。这是客厅,远一点是厨房——厨房里什么都有的,是真的能做饭的厨房,再旁边是卧室。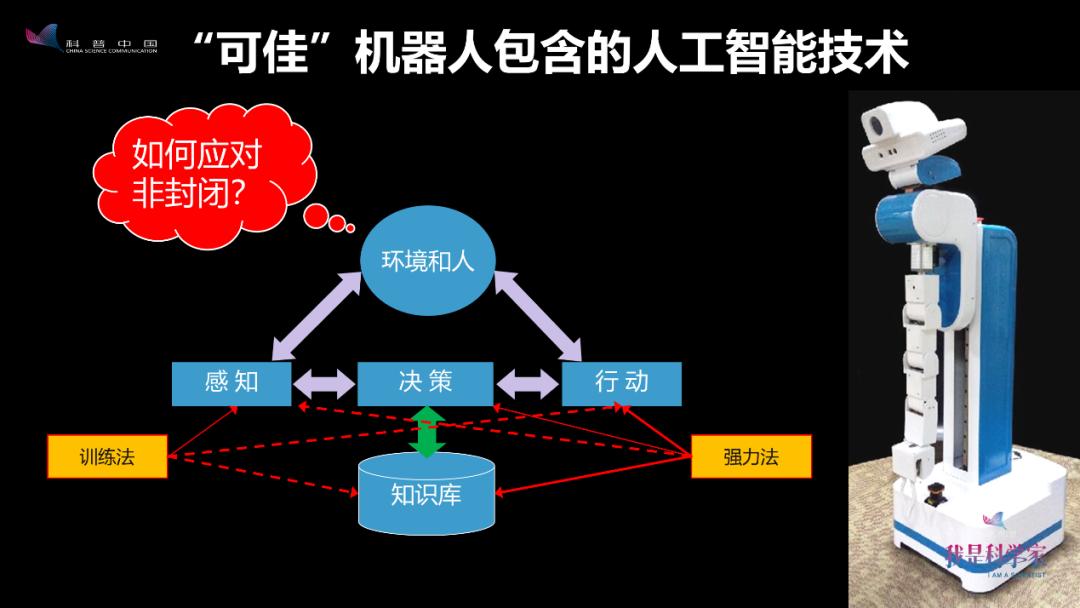 我们用的技术有很多,有强力法,有训练法,跟阿尔法狗一样;但对可佳机器人来说,这还不够,因为会碰到家庭环境非封闭的问题。
我们用的技术有很多,有强力法,有训练法,跟阿尔法狗一样;但对可佳机器人来说,这还不够,因为会碰到家庭环境非封闭的问题。什么是非封闭问题?比如,无人驾驶汽车在完全不受控制的全自然环境下的驾驶,再比如识别人真正的内心想法,非封闭问题是最复杂的AI问题。
那怎么办呢?我们就想了一些办法,提出两种技术,一种是开放知识,一种是融差性原理。看看用了这些新方法,我们的机器人能做什么?
这个视频就是可佳机器人在家里操作微波炉来帮你加热食品。这个视频里的操作相对简单,就是加热牛奶。2010年,可佳就可以做这件事了,不过还只是在实验室的环境。如果未来将可佳引入千家万户,每家的环境都不一样,而且用户的行为也有可能干扰机器人,会发生什么样变化、产生什么干扰,事先是无法预知的,这就是非封闭性。
2018年,我们想到了一个解决办法。现在可佳再做这件事情时,如果有人给它捣乱,它仍然能够正常工作。
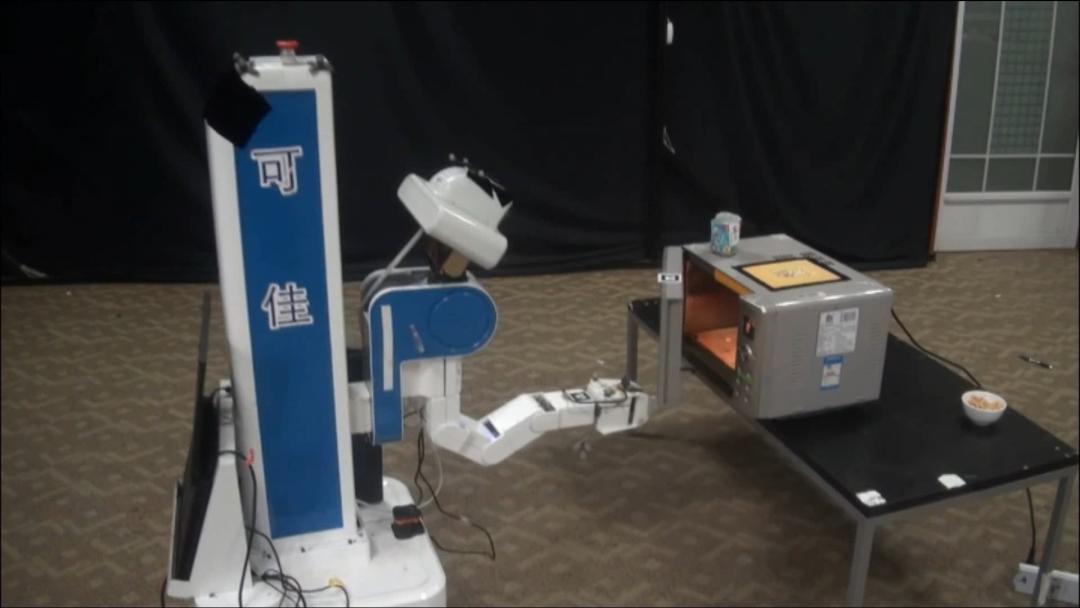 看,它现在开微波炉完全是自己做,不需要人遥控。它一开门,这个微波炉就会移动,注意看,微波炉的位置就不一样了。这就是一个非封闭性问题。然后人捣乱又把门关上了,它想一想,它把东西放在微波炉顶上,人又把微波炉打开了——人是最麻烦的。
看,它现在开微波炉完全是自己做,不需要人遥控。它一开门,这个微波炉就会移动,注意看,微波炉的位置就不一样了。这就是一个非封闭性问题。然后人捣乱又把门关上了,它想一想,它把东西放在微波炉顶上,人又把微波炉打开了——人是最麻烦的。 现在可佳还是有相当多办法,它想一想就知道该怎么办。但它一关门,这个微波炉又移动了,然后它要去按那个按钮,按钮的直径不到10毫米,它的偏差只要有3毫米就按不准,这对移动操作机器人非常难。所以需要用到强力法加训练法,再加上融差性原理,现在按这个按钮就相当准了。
现在可佳还是有相当多办法,它想一想就知道该怎么办。但它一关门,这个微波炉又移动了,然后它要去按那个按钮,按钮的直径不到10毫米,它的偏差只要有3毫米就按不准,这对移动操作机器人非常难。所以需要用到强力法加训练法,再加上融差性原理,现在按这个按钮就相当准了。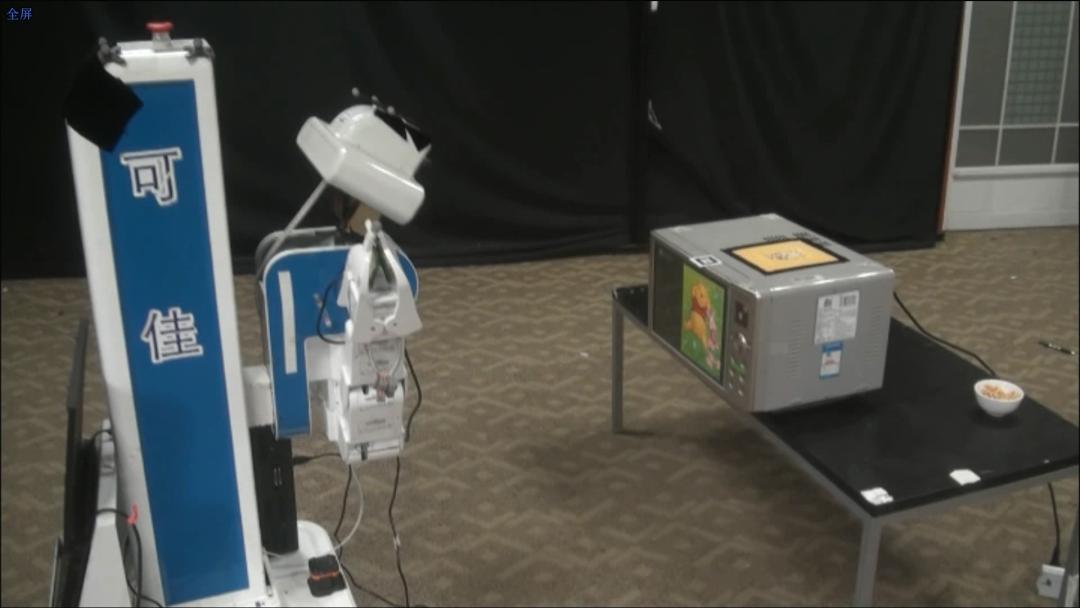 按了以后,它会去看这个显示屏,就知道是按准了,如果没按中,它还会去按。
按了以后,它会去看这个显示屏,就知道是按准了,如果没按中,它还会去按。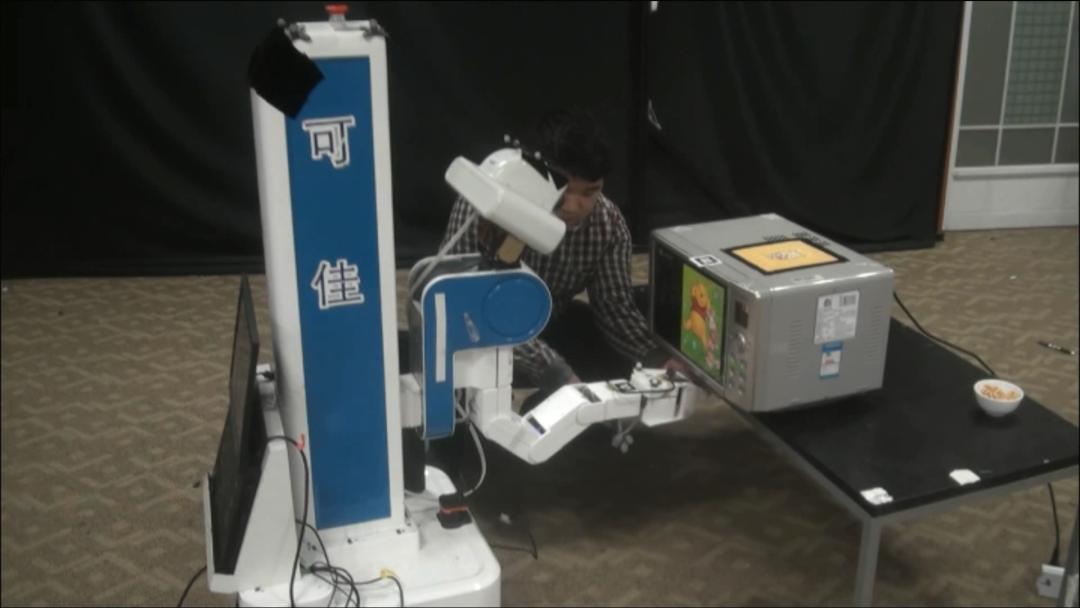 它现在要开门的时候,又有人捣乱,这次门就打不开。但它会想一想,认为自己下次能打开,就把这个门打开了。
它现在要开门的时候,又有人捣乱,这次门就打不开。但它会想一想,认为自己下次能打开,就把这个门打开了。这是一个比较短的视频,“加热牛奶”也是比较简单的操作,其实可佳还可以用微波炉做简单的饭,而且不仅可以做饭。
 这张照片是我们在参加比赛时做的实验。我们的一名队员躺在地上,模拟的是老人在家摔倒了,但是家里没人,怎么办?机器人要发现老人摔倒了,还要走过去帮助老人。可能老人说,赶紧给我吃一粒速效救心丸,那机器人就要能把药找到。
这张照片是我们在参加比赛时做的实验。我们的一名队员躺在地上,模拟的是老人在家摔倒了,但是家里没人,怎么办?机器人要发现老人摔倒了,还要走过去帮助老人。可能老人说,赶紧给我吃一粒速效救心丸,那机器人就要能把药找到。 这是可佳机器人在找药,找到后还要送过去,帮助老人吃药。当然机器人也可以发短信、发微信去报警,那都是很简单的事。更重要的是,机器人要在现场及时去帮助跌倒的人。现在中国已经有四千万失能老人,另外,民政部还有个数据,中国有3.5亿个家庭,其中2.5个亿家庭需要家庭服务。但我们的家庭服务员却只有不到1700万,而且这个数字在不断地减少。未来,我们只能依靠机器人。
这是可佳机器人在找药,找到后还要送过去,帮助老人吃药。当然机器人也可以发短信、发微信去报警,那都是很简单的事。更重要的是,机器人要在现场及时去帮助跌倒的人。现在中国已经有四千万失能老人,另外,民政部还有个数据,中国有3.5亿个家庭,其中2.5个亿家庭需要家庭服务。但我们的家庭服务员却只有不到1700万,而且这个数字在不断地减少。未来,我们只能依靠机器人。 我们发现,有的机器人刚才那些事情都能做得很好,但是它的手不行,抓东西比人要差很远。于是我们用融差性原理做了一个手爪,可以抓鸡蛋,抓比较大的东西,抓碗,抓软的东西,比如豆腐。
我们发现,有的机器人刚才那些事情都能做得很好,但是它的手不行,抓东西比人要差很远。于是我们用融差性原理做了一个手爪,可以抓鸡蛋,抓比较大的东西,抓碗,抓软的东西,比如豆腐。我们实验室研制的这款手爪很便宜,现在人民币100万进口的手爪都抓不了豆腐,但我们这个几千块钱的手爪能抓豆腐。
 看一下,这个豆腐非常软。
看一下,这个豆腐非常软。 看,豆腐被人抓碎了。
看,豆腐被人抓碎了。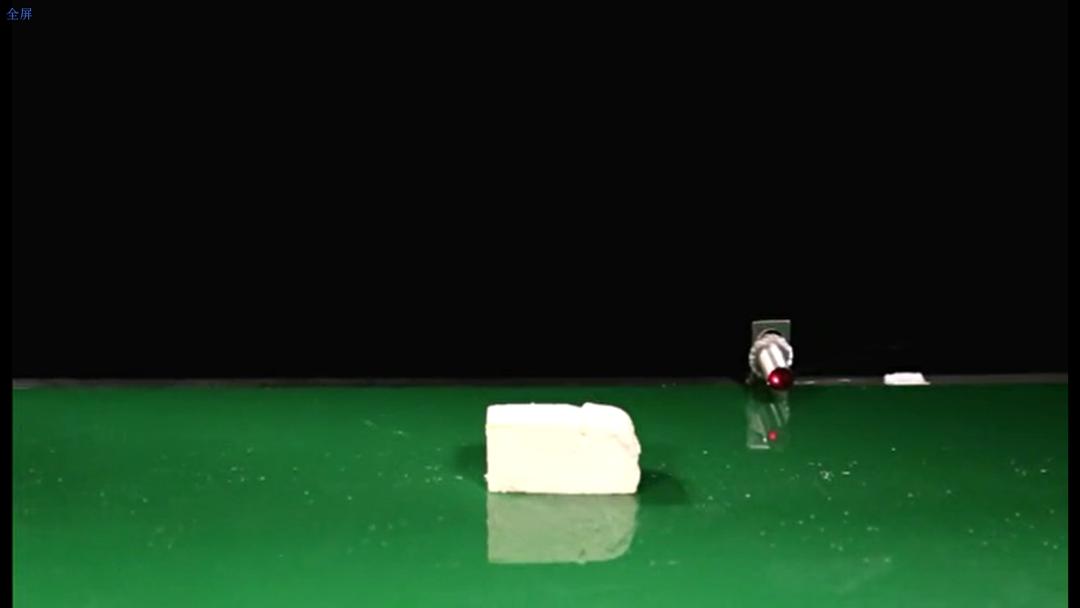 我们把这个豆腐和其他硬的东西都放在同一个传送带上,上面有一个摄像头,也是很便宜的那种一千块钱的摄像头,大致看一下豆腐的大小和位置。
我们把这个豆腐和其他硬的东西都放在同一个传送带上,上面有一个摄像头,也是很便宜的那种一千块钱的摄像头,大致看一下豆腐的大小和位置。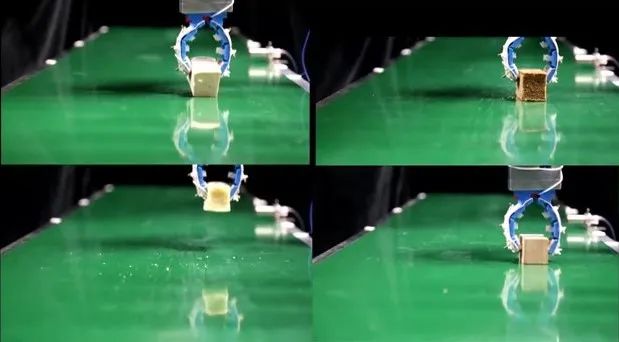 人用两个指头抓不起来的豆腐,这种手爪可以抓起来。
人用两个指头抓不起来的豆腐,这种手爪可以抓起来。这里面,木块很硬,蛋糕比较软,豆腐最软,这些东西我们的手爪都能抓起来。
我们做这个试验,研究人员一方面可以做科研,另一方面他们的生活能力也得到了锻炼,原来我的这些学生只会吃豆腐,现在也学会买豆腐了。
还有一件事也很困难。有人说,可佳它看上去是个机器,不像人,很多用户不太接受,说,什么机器人,你那个是机器,不是人。
于是我们想,怎么能让机器人更像人,像人一样可亲、可接受?
我们就做了佳佳机器人。佳佳机器人和人对话时,它能理解人的一些意思,包括理解上下文。
机器人干活其实是挺难的,但是相对情感交互来说,还是“干活”比较容易。比如说高铁,它运行的时候两边都有护栏,所以其实高铁的运行相对简单;但如果是无人驾驶,那就比高铁难多了,因为是个开放的环境;要让机器人去读懂人心,那就更难了。我们只看表面,都很难弄清楚人心里想的是什么。目前用强力法和训练法,是不能直接地去解决这些开放的问题的。所以在基础理论的研究中,我们要做更大的努力。
可另一方面,只要把一个实际问题封闭化,就像高铁的轨道,两边加上护栏,这个问题就大大变简单了。在大量的应用中,我们可以用封闭化的办法帮助制造业、物流行业、信息产业和一部分服务业转型升级。 刚才谈的都是技术,其实,还有些问题需要在技术之外考虑。比如我们想让人工智能把人心读得更准,我们想交互的时候让用户更接受机器人,觉得它像人一样可亲,这些短期内靠训练法、靠强力法是有难度的,至少未来十五年内是有难度的。
刚才谈的都是技术,其实,还有些问题需要在技术之外考虑。比如我们想让人工智能把人心读得更准,我们想交互的时候让用户更接受机器人,觉得它像人一样可亲,这些短期内靠训练法、靠强力法是有难度的,至少未来十五年内是有难度的。但我们可以换一个角度,不仅有科学的观点,还可以有人文的观点。佳佳就是这么做的,它的能力可能没有人强,但它的表现让人觉得非常可爱,乐意使用它,所以佳佳的追求目标是“人见人爱,春暖花开”。
另外,过去做研发,只要研发出新技术,研发出了一些新产品,只要有用户,在经济上能有很好的经济效益,那就会去推广这样的产品——但未来的创新模式会有所变化。比如说,如果一个产品它确实有很多用户,可是它导致了一些不好的社会后果,比如说导致大量的工人失业,那么,未来是否还要做这样的产品,我们就要谨慎考虑了,因为不能只考虑经济效益,还要考虑社会效益。
所以,我认为,未来社会会有更大的变化,未来人工智能参与设计的不仅仅是产品,而是要设计人工系统。这种人工系统的设计要综合考虑社会效益和经济效益。技术的发展会和人类的根本利益、福祉更紧密地结合,因为技术的目标就是要提高人类的福祉。
谢谢大家。 演讲嘉宾陈小平:《十年后,谁来帮你分担家务,排忧解难?》 | 拍摄:Vphoto
演讲嘉宾陈小平:《十年后,谁来帮你分担家务,排忧解难?》 | 拍摄:Vphoto作者:陈小平
监制:吴欧
策划:麦芽杨
编辑:麦芽杨 凝音