原标题:科学家开发新型合成纤毛 使微型软体机器人能够在液体中移动 来源:cnBeta.COM
草履虫和某些其他微生物通过来回甩动被称为纤毛的附属物在液体中移动。科学家们现在已经开发出一种新型的合成纤毛,可用于微型机器人等。纤毛从微生物的身体中伸出来,通过反复向前伸出然后向后扫动来推动它在液体环境中移动。它们不是齐头并进,而是开始分别移动,一个接一个,形成“波浪”,沿着微生物的长度方向移动。
研究人员以前曾创造过更大规模的人工纤毛,但这些系统往往在机械上相当复杂,而且体积太大,无法纳入小型设备中。然而,荷兰埃因霍温科技大学的一个团队最近创造了一个微小的软体机器人,它利用了一种更小、更简单的纤毛形式。
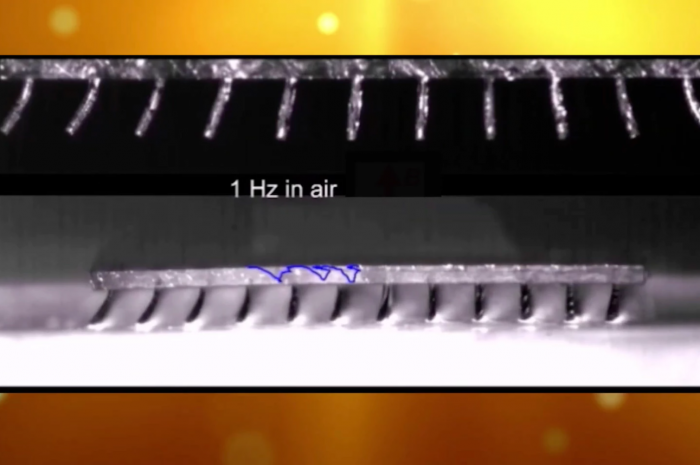
为此,科学家们将一种液体聚合物与羰基铁粉颗粒结合起来,然后将这种混合物倒入一个50微米宽的圆柱形孔阵列中,作为纤毛的模具。当聚合物开始固化成橡胶状时,放置在模具下方的磁铁使铁粒子在相邻的纤毛中以不同的方式排列,这使每个纤毛具有不同的磁性。

完成的4毫米长的机器人由一个固体聚合物底座组成,纤毛从一侧突出。当它被放置在纤毛朝上的水/乙二醇溶液中时,旋转磁场的应用使纤毛以波浪形式来回移动。这使得该装置的操作有点像一个泵,因为移动的附属物导致液体迅速流过它。
当机器人被翻转过来,使纤毛处于底部时,它们的运动使该装置能够在一个平面上移动。它甚至可以爬上一个45度的斜坡,并携带一个重达其自身重量10倍的物体。当旋转磁场的方向被扭转时,机器人也同样扭转了它的前行方向。
现在研究人员希望,一旦进一步发展,该技术可以在微流控系统内的泵,或用于输送药物或在患者体内执行其他功能的柔性微型机器人等应用中找到用途。
这项研究在最近发表在《ACS应用材料与界面》杂志上的一篇论文中进行了描述。