「复活」一个死去的蜘蛛用来干活,让人细思恐极的研究。
自然界给机器人研发带来很多灵感,仿生机器人层出不穷。但用真实动物身体做组件的机器人,你见过吗?
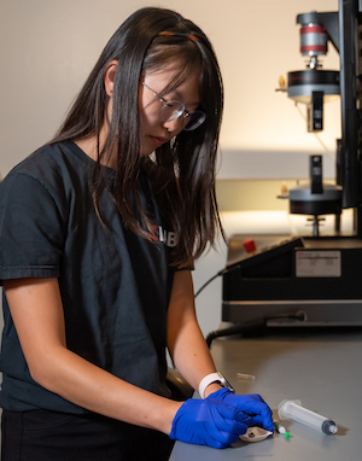
如下图所示,一只死去的蜘蛛正被用作机械抓手,捡起比它自身更重的物体:
这是一项来自美国莱斯大学的研究,论文发表在 Advanced Science 上:
论文地址:https://onlinelibrary.wiley.com/doi/full/10.1002/advs.202201174
我们知道,昆虫的负重能力是非常强大的,它们可以承载大于自身重量的物体。但人们想制造一个功能类似于昆虫的机器人是极为困难的。莱斯大学的这项研究直接利用了蜘蛛本身的优势。
活体蜘蛛通过调整血压来控制四肢,较高的压力会使肢体伸展,当体内的血压降低时,由于缺乏血压来平衡屈肌的力量,肢体就会卷曲,蜷缩起来。
研究者认为可以借助这一原理驱动一只死蜘蛛的肢体。他们把注射型针头插在蜘蛛的尸体上,向内注入一些空气,蜘蛛所有的腿就会膨胀并伸直,进而控制死蜘蛛的肢体伸缩:

我们来看看这个「蜘蛛抓手」都能做什么,抓起另一只蜘蛛:
操纵电路板:
在这项工作中,研究者使用无生命生物(死蜘蛛,狼蛛)的完整身体作为生物驱动器(如图 1),研究人员表示这是迈向 necrobotics 研究领域的第一步。该研究的策略与仿生方法不同,在仿生方法中,研究人员从蜘蛛的物理形态中寻找设计理念,随后在复杂的工程系统中实施。这项研究也不同于生物混合系统,不需要用活的或活性的生物材料作为基础,因此不需要精细的维护。
该研究利用蜘蛛的尸体来创建气动驱动抓手,只需一个简单的组装步骤即可实现全部功能,这能够规避制造流体驱动设备的繁琐步骤。
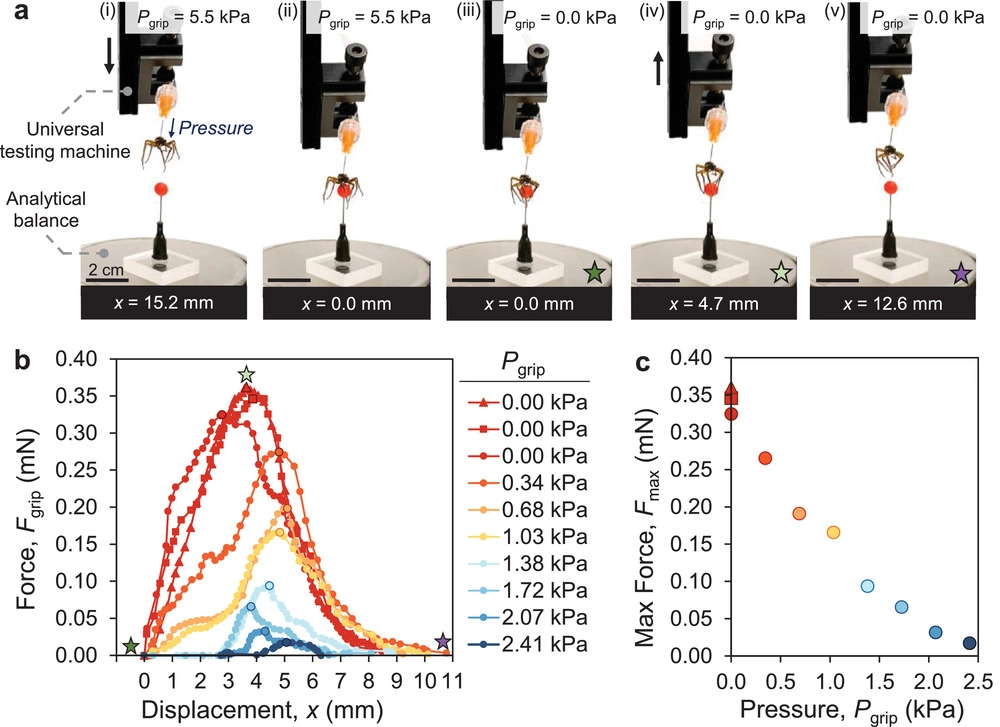
例如,PneuNet 抓手通常需要 3D 打印模具、需要铸造和组装多个不同组件,以及需要数小时或数天才能固化的弹性体,比较繁琐。而该研究利用蜘蛛尸体实现的气动抓手可以举起 1.3 倍于自身重量的物体,产生 0.35 mN 的峰值夹持力,并且可以承受约 700 次驱动循环。
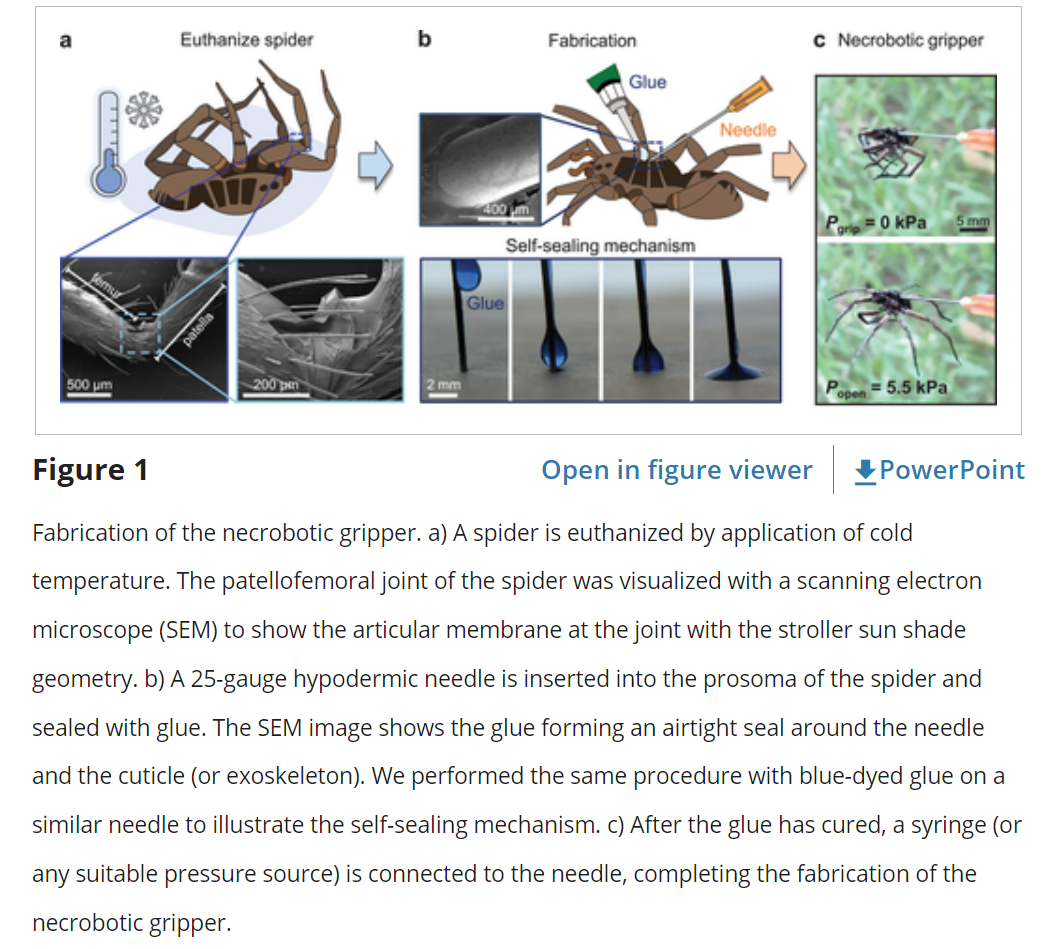
研究者制作蜘蛛抓手的过程大致如下:将针头插入蜘蛛尸体的前体区域,并用胶水将针头固定在蜘蛛的身体上以形成密封(图 1b)。从插入针头到设置胶水以创建一个完全可操作的抓手,大约十分钟内即可完成。
蜘蛛通过主动收缩前体中的肌肉来伸展每条腿,以增加其内部液压。对于蜘蛛抓手,外部气动压力源取代了蜘蛛中自有的调节作用,当蜘蛛内的压力增加到大气压力以上时,驱动四肢(图 1c)。加压和减压分别导致蜘蛛的所有腿同时打开和关闭,有效地充当抓手。
下图展示了蜘蛛抓手的力与位移表征:
论文作者之一 Faye Yap 说这项研究的灵感来源于生活中的观察:「有一天我们在实验室里移动东西时注意到走廊边缘有一只蜷缩的蜘蛛,我们就很好奇为什么蜘蛛死后会蜷缩起来。」
他们搜索百科知识找到了答案:蜘蛛没有对抗性肌肉对(例如人类的二头肌和三头肌一样),它们只有屈肌,可以让他们的腿弯曲,并通过液压向外伸展。它们死后就失去了主动给身体加压的能力,因此会蜷缩起来。
Yap 和其他研究成员觉得这很有趣,于是他们试图找到一种方法来利用这种机制。
值得注意的是,较小的蜘蛛承受负载的能力可能比较大的蜘蛛更强。例如,10 毫克的小型跳蛛可以施加超过其体重 200% 的抓握力,而 200 克巨型蜘蛛的抓握力可能只有自身体重的 10%。
不过,蜘蛛在这项研究中也不是全程没有受到伤害。研究者表示:「目前没有关于蜘蛛的道德采购和人道安乐死的明确指导方针。」该研究所用的狼蛛尸体是通过将其置于冰冻温度(约 - 4°C)下 5-7 天安乐死获得的。